Le robot Curiosity commence vendredi sa mission d'exploration de deux ans sur la planète Mars, à la fin d'une phase de vérifications et de rodage.
L'engin se trouve à la surface de Mars depuis le 6 août.
Selon Jennifer Trosper, responsable de la mission au laboratoire Jet Propulsion de la NASA, la phase des vérifications est un succès total puisque tous les tests montrent que Curiosity fonctionne à merveille.
Durant les derniers jours, les ingénieurs ont particulièrement testé le fonctionnement du bras robotique et du système de prélèvement d'échantillons au sol.
Objectif Glenelg
La première étape de Curiosity se trouve à environ 400 m de sa position. C'est un endroit intéressant sur le plan géologique, appelé Glenelg, qui se trouve à l'intersection de trois types de terrain.
L'engin roulera pendant 10 jours à raison de 40 mètres quotidiennement, pour s'y rendre. Les plans pourraient être modifiés si le robot passe près de roches intéressantes à étudier en chemin. La durée du trajet pourrait donc s'allonger.
Selon la NASA, le premier prélèvement prévu ne sera pas réalisé avant un mois.
Pour se roder, Curiosity a déjà parcouru 109 mètres depuis son arrivée sur Mars dans le cratère de Gale.
En outre, cette mission doit le conduire au pied du mont Sharp, à huit kilomètres de son point de départ.
Le Canada participe aussi à l'aventure
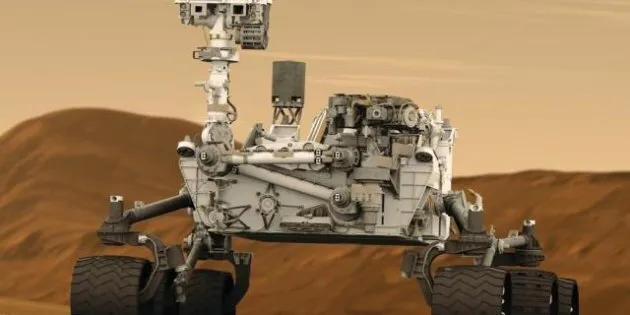
L'agence spatiale canadienne fournit en effet un spectromètre à particules alpha et rayons X (APXS). La tâche du capteur APSX, de la taille d'un cube de Rubik et fixé à l'extrémité du bras du robot, est d'analyser les composés chimiques des pierres et du sol de Mars.
INOLTRE SU HUFFPOST
